Here we describe the main aspects of some production-level Physically Based Animation libraries/middleware.
For each one we'll focus on:
- Features: Which kinds of physics models can they simulate, constraints, solvers used, etc...
- Scene description: How do they model the animated scenes, which concepts and classes do they deal with.
- Simulation Stages: Which processes are needed to perform from the App point of view in order to simulate the physical world. This includes the initialization and modification of the simulated world (from the App side), the actual simulation step and the communication of data and events back to the App.
- Pipeline: The sequence of actions performed within the PBA library to simulate the world.
- Interface/API: A global description of the interface offered to the Apps (main API strategy and features)
- Rigids And Joints only
- Uses Stewart-Trinkle Timestepping method with decoupled friction (symmetric matrix)
- dWorld: Dynamics world
- dSpace: Collision Space
- dBody: Rigid Body
- dGeom: Collision Geometry
- dJoint
- dJointGroup: Group of joints (for fast adding/removing)
fd
- Models
- Interactions: Generic, based on proximity queries
- Joints:
Havok Game Dynamics SDK
- Character Toolkit:
- Global i Local Ragdolls
- No només bípeds!
- Controller tipus Quake
- Vehicle Toolkit:
- Diversos tipus: cotxes, motos, etc...
- Destruibles
- Environment:
- Constraints, Joints, Breakable, explosions...
=> No té S.Partícules ni Cloth ni Rope ni Soft Objects??
Reactor: Plugin pel 3dsMax (Havok Powered!)
- Rigids
- Rope
- Cloth:
- Self Intersections
- Interacció amb la resta
- Soft Body
- Mesh
- FFD (pels molt complexos)
- Fluid Dynamics
Everything extracted from Karma User's Guide.
- Karma uses Time-Stepping scheme (Trinkle, Stewart, etc...)
Constraint Solvers:
- Kea: LCP mètode de solució directe
- Arthur: LCP mètode iteratiu, menys memòria
Integrators:
- Implicit Euler
- External forces integrated explicitly
- MdtWorld: Món de la dinàmica
- MdtBody: Dynamics Object
- MdtContactGroup: Colisió real entre Models
- McdSpace: Món de la detecció de colisions
- McdModel: Collision Object
- McdModelPair: Colisió entre capses contenidores
- MstBridge: Conté materials (fricció, etc...)
At a basic level, the Karma simulation process can be described in three steps:
- The user describes at the API level a closed system at time instant t.
- An internal mathematical representation of the system is built by the software.
- The system is evolved, with account taken of any new objects entering the system or additional forces arising, at a future time t.
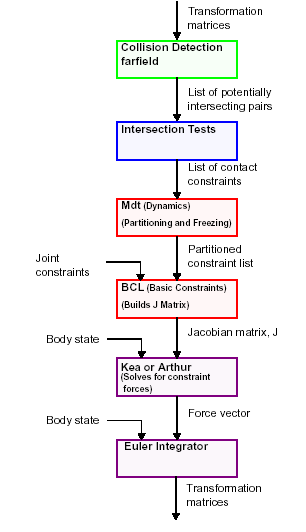
Karma Pipeline Illegally Ripped from the User Guide
- Has Rocket/PSCL, Physics Scripting Language
- Rigids i Constraints i Joint Límits
- Documentació patètica
- Demos mostren interpenetracions bastant grans...
- Rigid Particles (em sembla que lo únic que fan és no xocar entre ells i ja està, però tenen orientació i xoquen amb l'entorn...)
Generated on Tue Aug 10 15:58:31 2004 for Saphyre2 by
 1.3.5
1.3.5